UART Communication Link Implementation with Verilog HDL on FPGA
This post is regarding a HDL implementation of a UART(Universal
Asynchronous Receiver Transmitter) for one of our university fourth semester
projects. This was a group project of four group members. My group members are
Chirath Diyagama, Isuru Nuwanthilaka and Dileepa Sandaruwan. For the project we
were supposed to implement a UART link for a FPGA development board using
Verilog as the HDL and send some data to another FPGA development board which
also have a UART implementation. Here we
used a Used a Digilant Atlys FPGA development board with a Xilinx FPGA. That
board is actually expensive to buy. But we barrowed that one from our
laboratory for this project. There is no problem if you want to implement this
using another board.


Here we actually doing a bi-directional asynchronous
communication between two FPGA board. Atlys FPGA board has certain number of
switches as internal peripherals. We used each of them to represent a binary
value. Using 8 switches we sent 8bit data words to other board. Then there are
8 LEDs assigned in to the output of the receiver and it will display the
received data using that LEDs. After the communication between two boards we
will talk about communication between a FPGA board and a Computer through USB
connections. In order to do so the only
need is a USB to UART bridge for your board. There are so many cheaper boards
with Xilinx and Altera chips which you can find from online sites.
UART data frame
The structure of a UART frame can be illustrated
as the above. Normally the data field can be varied from 4 bits to 9bits. There
can be occupied a parity bit also.

When we
consider the UART data frames that has several data fields. Here we are using
only these fields.
●
Start
Bit
●
Data
bits
● Stop bit/bits
For our project we are using one start bit, eight data bits
and two stop bits.
Baud Rate Generator
Every microprocessor and microcontroller require a clock
signal because there are sequential circuits inside them. In our case also,
there is an internal clock signal generator integrated onto the FPGA
development board which provides a 100 MHz clock signal.
UART communication process also require a clock
signal in order to generate and send each bit. But we cannot use the internal
clock signal directly to our application. There are some standard Serial
communication baud rates which the both transmitter and receiver parties should
agree. Here we decided to use 115200 bits per second as the serial baud rate.
We need a square shaped pulse at the above-mentioned clock rate in order to maintain a successful
data communication.

As a solution, we designed a Baud
tick generator module using Verilog HDL and the schematic can be illustrated as
shown in above figure. The only input is
the internal 100Mhz clock signal and the output is the Required Baud tick signal.
Verilog Code for the Baud Tick Generator
module BaudTickGen(
input
clk, enable,
output
tick // generate a tick at the specified
baud rate * oversampling
);
parameter ClkFrequency = 100000000; //100MHz
parameter Baud = 9600;
parameter Oversampling = 1;
function integer
log2(input integer v);
begin
log2=0;
while(v>>log2)
log2=log2+1;
end
endfunction
localparam AccWidth =
log2(ClkFrequency/Baud)+8; // +/- 2% max
timing error over a byte
reg
[AccWidth:0] Acc = 0;
localparam
ShiftLimiter = log2(Baud*Oversampling >> (31-AccWidth));
//
this makes sure Inc calculation doesn't overflow
localparam Inc =
((Baud*Oversampling << (AccWidth-ShiftLimiter))...
...+(ClkFrequency>>(ShiftLimiter+1)))/(ClkFrequency>>ShiftLimiter);
always @(posedge clk) if(enable) Acc <= Acc[AccWidth-1:0]
+ Inc[AccWidth:0]; else Acc <= Inc[AccWidth:0];
assign
tick = Acc[AccWidth];
endmodule
Here we are taking two inputs for our module as the input clock signal (which is a 100MHz ) and enable input to turn on or off the communication process. We have one output which is the baud tick signal.
parameter ClkFrequency = 100000000; //100MHz
parameter Baud = 9600;
Here we defined the Input Clock frequency in Hertz and the the desired baud rate in ticks per second.
Here we defined the Input Clock frequency in Hertz and the the desired baud rate in ticks per second.
Integration of Baud Generator
Here we integrate this baud tick generator module in to both
UART Receiver module and UART Transmitter modules. Therefore, both of them
taking input clock as our FPGA board’s internal clock signal which is a 100MHz
signal and then inside each module Baud tick generator converts 100MHz square
pulse in to a 115200 ticks per second baud signal.
UART Transmitter

Here we take three inputs to the Transmitter which are the parallel 8 set of input which contains the exact data we need to send, the starting input which act as a transmission on/off switch and the inbuilt clock signal from the FPGA development board.
Inside this module we have our previously discussed baud tick generator and parallel to serial converter. Parallel data coming from 8 lines are time synchronously added together in to the rhythm of the baud tick and give to the out as a serial data stream on a single line. We also have another output to indicate an end of a packet called 'Tx_done'.
Verilog Code for Transmitter
module UART_transmitter(
input clk,
input
TxD_start,
input [7:0]
TxD_data,
output wire
TxD,
output reg
TxD_done//Txdone,
);
// Assert TxD_start for (at least) one clock cycle to start
transmission of TxD_data
// TxD_data is latched so that it doesn't have to stay valid
while it is being sent
parameter ClkFrequency = 100000000; // 100MHz
parameter Baud = 115200;
wire TxD_busy;
/////////////////////////////////////Baud tick
Generartor/////////////////////
wire BitTick;
BaudTickGen #(ClkFrequency, Baud) tickgen(.clk(clk),
.enable(TxD_busy), .tick(BitTick));
//`endif
//////////////////////////////////////////////////////////////////
reg [3:0] TxD_state = 0;
assign TxD_ready = (TxD_state==0);
assign TxD_busy = ~TxD_ready;
reg [7:0] TxD_shift = 0;
always @(posedge clk)
begin
if(TxD_ready
& TxD_start)
begin
TxD_shift <= TxD_data; end
else
if(TxD_state[3]
& BitTick) //Data
bits(byte) sending
begin
TxD_shift <= (TxD_shift >> 1); end //input
byte is sening in each clock cycle one by one
case(TxD_state) //counting each bit
4'b0000
: if(TxD_start)
begin
TxD_state
<= 4'b0100;
TxD_done<=0;
end
4'b0100:
if(BitTick) TxD_state <= 4'b1000; //
start bit
4'b1000:
if(BitTick) TxD_state <= 4'b1001; //
bit 0
4'b1001:
if(BitTick) TxD_state <= 4'b1010; //
bit 1
4'b1010:
if(BitTick) TxD_state <= 4'b1011; //
bit 2
4'b1011:
if(BitTick) TxD_state <= 4'b1100; //
bit 3
4'b1100:
if(BitTick) TxD_state <= 4'b1101; //
bit 4
4'b1101:
if(BitTick) TxD_state <= 4'b1110; //
bit 5
4'b1110:
if(BitTick) TxD_state <= 4'b1111; //
bit 6
4'b1111:
if(BitTick) TxD_state <= 4'b0010; //
bit 7
4'b0010: if(BitTick) TxD_state <=
4'b0011; // stop1
4'b0011:
if(BitTick) // stop2
begin
TxD_state
<= 4'b0000;
TxD_done<=1;
end
default:
if(BitTick) TxD_state <= 4'b0000;
endcase
end
assign TxD = (TxD_state<4) | (TxD_state[3] &
TxD_shift[0]); // put together the
start, data and stop bits
endmodule
Here we are calling the Baud tick generator from the inside of the transmitter to sample the input data.
UART Receiver
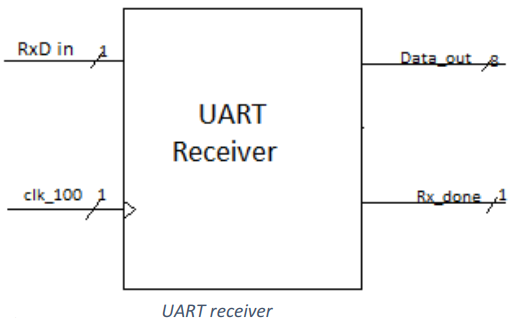
UART receiver taking two inputs which are input clock signal and the serial data input which is carrying a serial data stream sampled in a standard Baud Rate. Input serial data is again formed in to a set of 8 data lines after each packet is arrived in to the receiver.
Verilog Code for Receiver
module UART_receiver(
input clk,
input RxD,
output reg
Rx_done=0,
//output
reg RxD_data_ready = 0,
output reg
[7:0] RxD_data = 8'd0 // data received,
valid only (for one clock cycle) when RxD_data_ready is asserted
// asserted when no data has been received
for a while
//output
reg RxD_endofpacket = 0 // asserted for
one clock cycle when a packet has been detected (i.e. RxD_idle is going high)
);
parameter ClkFrequency = 100000000; // 100MHz
parameter Baud = 115200;
parameter Oversampling = 8;
// needs to be a power of 2
// we oversample the RxD line at a fixed rate to capture
each RxD data bit at the "right" time
// 8 times oversampling by default, use 16 for higher
quality reception
wire RxD_idle;
////////////////////////////////
reg [3:0] RxD_state = 0;
//reg RxD_data_ready = 0;
`ifdef SIMULATION
wire RxD_bit = RxD;
wire sampleNow = 1'b1;
// receive one bit per clock cycle
`else
wire OversamplingTick;
BaudTickGen #(ClkFrequency, Baud, Oversampling)
tickgen(.clk(clk), .enable(1'b1), .tick(OversamplingTick));
// synchronize RxD to our clk domain
reg [1:0] RxD_sync = 2'b11;
always @(posedge clk) if(OversamplingTick) RxD_sync <=
{RxD_sync[0], RxD};
// and filter it
reg [1:0] Filter_cnt = 2'b11;
reg RxD_bit = 1'b1;
always @(posedge clk)
if(OversamplingTick)
begin
if(RxD_sync[1]==1'b1
&& Filter_cnt!=2'b11) Filter_cnt <= Filter_cnt + 1'd1;
else
if(RxD_sync[1]==1'b0
&& Filter_cnt!=2'b00) Filter_cnt <= Filter_cnt - 1'd1;
if(Filter_cnt==2'b11)
RxD_bit <= 1'b1;
else
if(Filter_cnt==2'b00)
RxD_bit <= 1'b0;
end
// and decide when is the good time to sample the RxD line
function integer log2(input integer v); begin log2=0;
while(v>>log2) log2=log2+1; end endfunction
localparam l2o = log2(Oversampling);
reg [l2o-2:0] OversamplingCnt = 0;
always @(posedge clk) if(OversamplingTick) OversamplingCnt
<= (RxD_state==0) ? 1'd0 : OversamplingCnt + 1'd1;
wire sampleNow = OversamplingTick &&
(OversamplingCnt==Oversampling/2-1);
`endif
// now we can accumulate the RxD bits in a shift-register
always @(posedge clk) begin
//if(Rx_done) Rx_done =0;
case(RxD_state)
4'b0000: if(~RxD_bit)
begin
RxD_state
<= `ifdef SIMULATION 4'b1000 `else 4'b0001 `endif; // start bit found?
Rx_done<=1'b0;
//Rxdone<=0;
end
4'b0001:
if(sampleNow) RxD_state <= 4'b1000;
// sync start bit to sampleNow
4'b1000:
if(sampleNow) RxD_state <= 4'b1001;
// bit 0
4'b1001:
if(sampleNow) RxD_state <= 4'b1010;
// bit 1
4'b1010:
if(sampleNow) RxD_state <= 4'b1011;
// bit 2
4'b1011:
if(sampleNow) RxD_state <= 4'b1100;
// bit 3
4'b1100:
if(sampleNow) RxD_state <= 4'b1101;
// bit 4
4'b1101:
if(sampleNow) RxD_state <= 4'b1110;
// bit 5
4'b1110:
if(sampleNow) RxD_state <= 4'b1111;
// bit 6
4'b1111:
if(sampleNow) RxD_state <= 4'b0010;
// bit 7
4'b0010:
if(sampleNow)
// stop bit
begin
RxD_state
<= 4'b0000;
Rx_done
<= 1'b1;
//Rxdone<=1;
end
default:
RxD_state <= 4'b0000;
endcase
end
always @(posedge clk)
if(sampleNow && RxD_state[3]) RxD_data <=
{RxD_bit, RxD_data[7:1]};
`ifdef SIMULATION
assign RxD_idle = 0;
`else
reg [l2o+1:0] GapCnt = 0;
always @(posedge clk) if (RxD_state!=0) GapCnt<=0; else
if(OversamplingTick & ~GapCnt[log2(Oversampling)+1]) GapCnt <= GapCnt +
1'h1;
assign RxD_idle = GapCnt[l2o+1];
`endif
Endmodule

Output from the Simulator









